
跟踪转台
在运动载体上的光电成像跟踪系统,为克服载体运动引起的光电成像传感器视轴运动晃动,保证探测设备对目标的稳定瞄准和精确跟踪,都需要有稳定的空间惯性坐标基准。此跟踪平台能够隔离载体角运动和视轴的扰动,为测量设备提供一个不受载体运动影响的惯性稳定基准,实现对目标的跟踪。

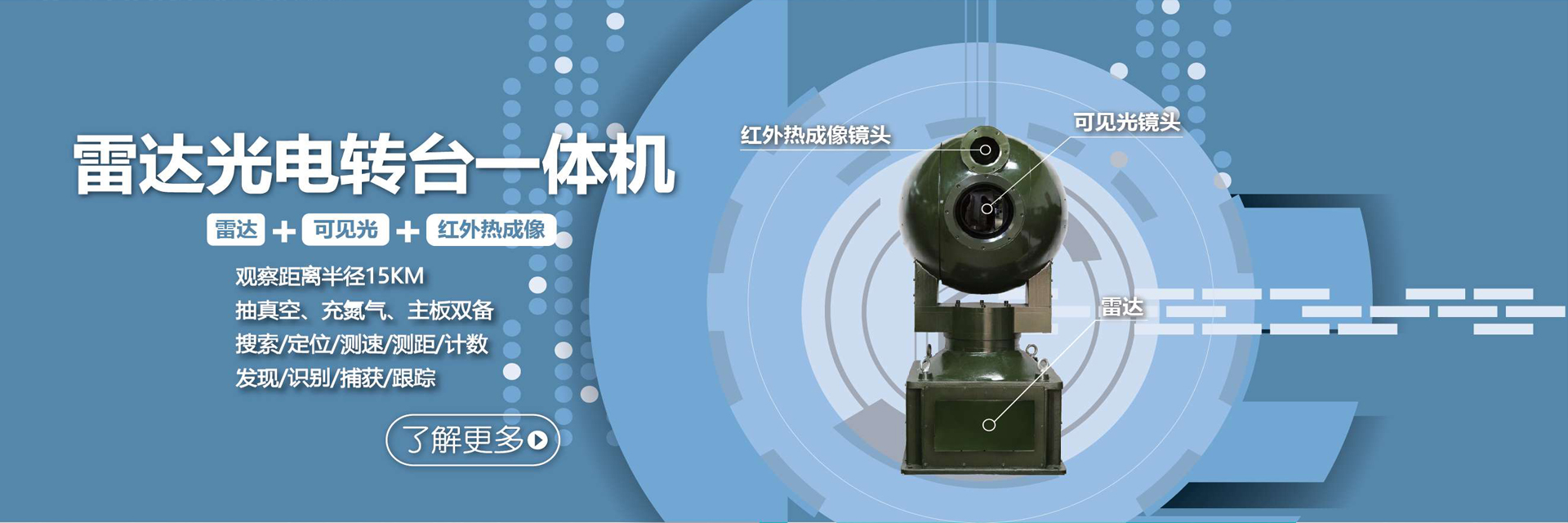
跟踪转台由U型架、可见光摄像机、红外摄像机、视频跟踪模块、近程控制计算机、伺服驱动器、GPS授时模块、通信接口设备等组成。其中,可见光摄像机、红外摄像机、伺服控制器安装在转台本体内,近程控制计算机、视频跟踪器、GPS授时模块及通信接口设备集成安装在一个机箱内,统称近程控制组合。

跟踪转台组成:
由力矩电机、光电编码器、可见光摄像机、红外热像仪(平台搭载探测设备可按用户需求配置)伺服控制板和伺服驱动板、视频跟踪板等部分构成。
功能特点:
Ø 具备方位和俯仰两个自由度运动功能。
Ø 具备红外跟踪器,自动跟踪热目标功能
Ø 具备单杆控制功能
Ø 具备绝对时标
Ø 具备调平机构
Ø 通过网口或串口与控制微机进行信息交互;
Ø 具有搜索、定位、跟踪等功能(车载或落地);
Ø 具有无依托定位、标校功能;
Ø 接收外同步时统功能;
Ø 输出原始视频信号(电视、红外);
Ø 视频可叠加目标位置、镜头状态等信息;
Ø 实时输出指向器角度、速度信息。
技术指标:
1)工作范围:方位:0~360°;俯仰:-25°~+185°(可定制范围);
2)光电编码器分辨率65535,定位精度≤0.005°
3)最大方位回转速度:≥80°/s;最大方位回转加速度:≥60°/s²;最小方位回转速度:≤0.01°/s;
4)最大俯仰回转速度:≥60°/s;最大俯仰回转加速度:≥60°/s²;最小俯仰回转速度:≤0.01°/s。
5)最大负载:30kg(可按负载重量定制)
6)调平功能:底座带调平装置
7)伺服驱动控制:接收外部控制设备送来的伺服跟踪控制量,支持位置、速度、转矩控制等工作模式跟踪目标;驱动器可对转台主要工作状态参数(角度、转速、限位、过载、温度等参数)进行实时采集处理,并对外主动输出;
8)跟踪精度:在工作角速度、工作角加速度范围内,最大跟踪误差≤3.5′
9)通信接口:
转台
转台对外共有四个接口:网口、同步串口、复合视频接口(一路)、原始视频(两路)
控制箱
显控箱四个接口:供电接口、网口、同步串口、复合视频接口
10)电源:直流24V 10A
11)工作温度:-30~+75℃
12)存储温度:-40~+85℃
应用范围:
陆海边防跟踪监控、海事远距离跟踪监控、科研院所研究、智慧环保及环境监测、教学科研等领域。




