
陕西冠杰定制 U 型双轴光电转台技术方案:高精度光电跟踪与方位定制
一、引言
二、技术原理与架构
(一)机械结构
(二)驱动系统
电机选型:配备高扭矩、低惯量的伺服电机,能快速响应控制指令,实现转台的精准启停与变速。电机具备高分辨率编码器,反馈精度可达亚角秒级别,为精确位置控制提供保障。
传动机构:采用高精度齿轮齿条传动与蜗轮蜗杆传动相结合的方式。齿轮经特殊热处理与磨齿工艺,降低齿面粗糙度,提高传动精度,减少回程间隙,确保电机扭矩高效、精准传递至转台轴系。
三、高精度光电跟踪实现
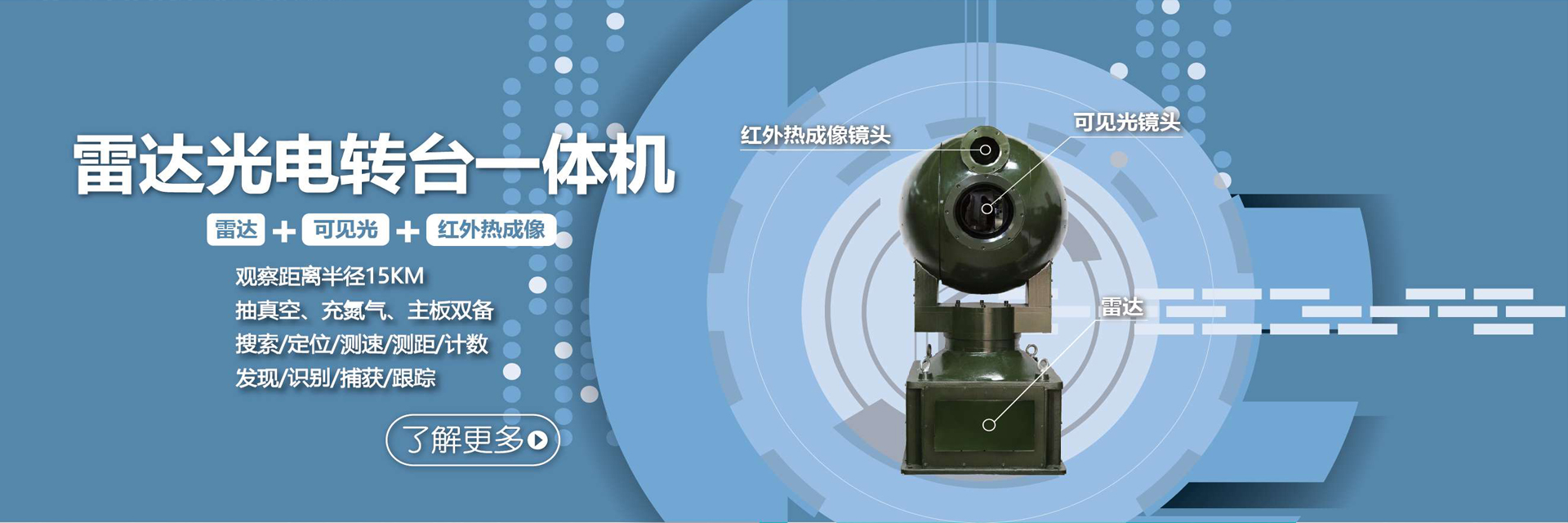
(一)光学系统
镜头组件:选用定制的高分辨率、大口径光学镜头,具备自动对焦与变焦功能。镜头采用超低色散光学玻璃,有效减少色差,保证成像清晰度与色彩还原度,满足对远距离目标的高精度观测需求。
图像传感器:搭载先进的 CMOS 图像传感器,具有高灵敏度、低噪声特性,可快速捕捉目标图像。传感器像素高达 [X] 万以上,能够识别目标的细微特征,为跟踪算法提供丰富数据。
(二)跟踪算法
目标识别:运用深度学习算法,对采集的图像进行实时分析,自动识别目标物体。算法经过大量样本训练,可准确区分不同类型目标,如人员、车辆、天体等。
跟踪策略:采用卡尔曼滤波与粒子滤波相结合的算法,对目标运动轨迹进行预测与跟踪。该算法能根据目标的历史位置与运动状态,实时调整转台的转动角度,确保目标始终处于视场中心,实现稳定、精准的跟踪。
四、方位定制技术
(一)控制系统
控制器:采用高性能工业控制器,具备强大的数据处理能力与实时控制功能。控制器可接收外部指令,如上位机发送的目标方位信息,也可根据内部跟踪算法生成控制信号,精准控制转台运动。
软件界面:开发定制化操作软件,用户可通过直观界面设置转台的初始方位、跟踪范围、运动速度等参数。软件支持手动操作与自动跟踪模式切换,方便用户根据实际需求灵活使用。
(二)定位与校准
绝对编码器:在转台的双轴上安装绝对编码器,实时反馈转台的绝对位置信息。编码器精度高,可确保转台在任意位置的定位误差控制在极小范围内。
校准算法:定期对转台进行校准,通过测量已知目标方位与转台实际指向的偏差,运用校准算法对转台的位置参数进行修正,进一步提高方位控制精度。




