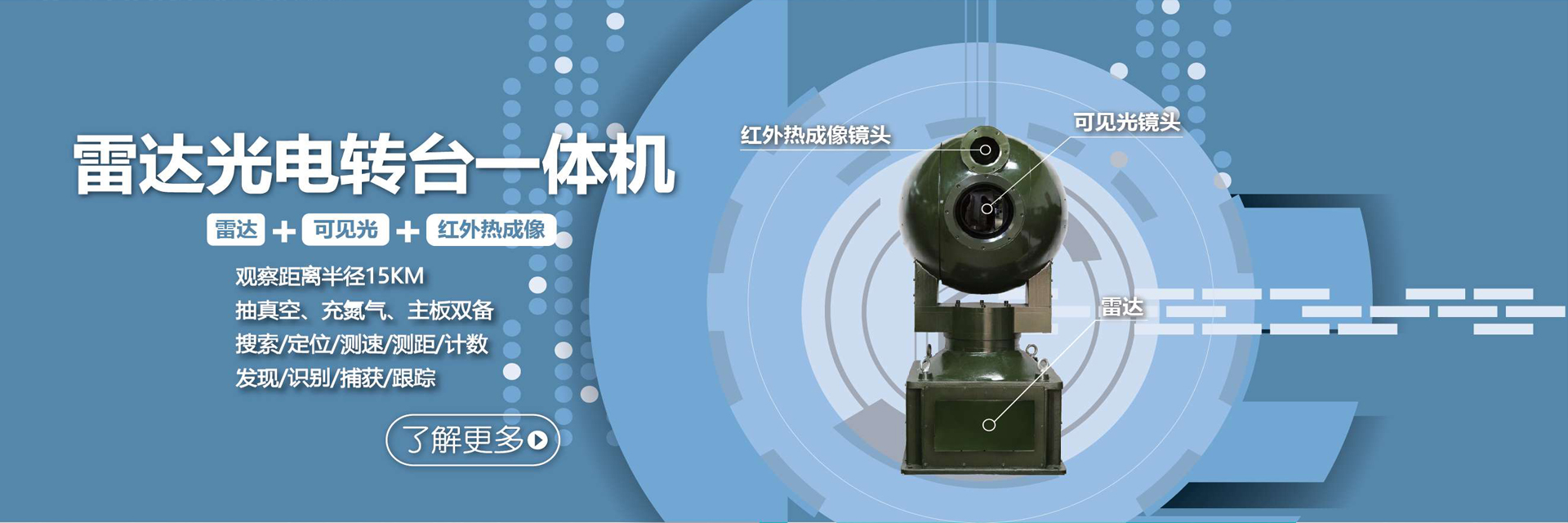

光电跟踪系统平台由光电跟踪转台视频跟踪高速动态目标的设备,它用红外热成像捕获目标、控制转台实时跟踪目标;用可见光观察目标并把目标的运行轨迹存储到硬盘上,其它用户可时时访问目标飞行轨迹。它安装在车上,每次跟踪目标时,把车开到目标出现的地域,通过GPS测量出转台的地理坐标,就可时时地域内目标
整体设计

图2- 1光电追踪转台组成

图2- 2 光电跟踪转台内部框图
光电跟踪转台的主控CPU采用STM32F407,ARM的控制芯片,带DSP增强核。主控芯片负责采集跟踪板的信号,通过can总线完成对转台电机的控制,结合GPS模块,实现对转台的实时跟踪。当红外发现目标,存储计算机存储红外模拟图像和高清相机的实时数据,以便后期的观测和处理。由于高清相机直接是高清信号,必须通过带HDMI高清监视器进行查看。
平台电路实现技术路线
为了满足用户的现有需求,硬件采用模块化设计,分为平台控制板、DSP跟踪板和电机驱动板组成。
1)主控板:
主控板是整个光电跟踪云台的主要核心部件,系统以STM32f407微处理器为核心,该处理器主频可以达到168M,并带DSP协处理器。整个系统的硬件结构框图如图2-3所示。其中电源管理模块和复位电路模块为整个系统提供稳定的供电需求,同时保护系统的硬件安全;GPS模块是系统授时和定位;网卡控制模块负责与管理主机进行指令下发和转台参数的实时回传,转台参数主要包括温度、湿度、电流和电压等信息,通过STM32F407内部自带的12位AD进行采样;存储模块主要完成现场的运行参数存储和本地参数的存储功能;跟踪板信号通过主控板的232接口进行通信的,数据传输方式采样实时上报的模式;为了提高驱动板的控制的实时性和一致性,系统采用CAN总线接口,波特率是500kbps;相机控制接口,主要完成相机的自动变倍和聚焦功能,也可以通过手动模式。

图2- 3 主控制模块
2)相机驱动板
相机驱动板的主控CPU,也是采用STM32f407微处理器,利用隔离的485接口芯片RSM485以及选用BD7931F作为相机的聚焦和变倍电机的驱动组成,其中AD采集变倍聚焦的数据,为实时跟踪提供计算依据。整体结构如图2-4所示。

图2- 4 相机驱动模块
3)电机驱动板
电机驱动板的主控CPU采用STM32f407微处理器和电机驱动芯片DRV8402DKD实现电机的控制,利用ARM的正交编码接口作为编码器反馈的采样,结合PID算法和PWM控制,让系统达到控制精度的要求,为了实现驱动板和主控芯片的实时通讯,本系统选用隔离的CAN接口芯片CTM8251AT。结构框图如图2-5所示。

图2- 5 电机驱动模块
视频跟踪板主要采用DM642作为算法处理器,利用编解码芯片实现对模拟图像的解码,送给处理器进行分析,然后把偏差信号的接口通过隔离芯片RSM232D_DS送给主控芯片,实现对目标的捕获,其框图如图2-6所示。

图2- 6 视频跟踪板




